К вопросу защиты трубопроводов водо- и теплоснабжения от гидравлических ударов
Авторы: Заслуженный изобретатель РФ, д.т.н., Х.Н. Низамов; к.т.н. В.Н. Применко; д.т.н. Л.М. Саликов; В.В. Сулименко;
Российский университет дружбы народов
Журнал «Двойные Технологии», №3, 2005г.
В статье получены соотношения для расчета неустановившегося течения жидкости в трубопроводе и основные проектные характеристики стабилизаторов давления, используемых для защиты трубопроводов водо- и теплоснабжения от гидравлических ударов.
Одним из современных средств гашения волновых процессов в трубопроводных системах являются стабилизаторы давления. Принцип их работы основан на распределенном по длине трубопровода диссипативном и упругодемпфирующем воздействии на пульсирующий поток перекачиваемой среды. Наибольший эффект гашения достигается при диссипации энергии пульсаций на перфорационных отверстиях, равномерно распределенных по длине стабилизатора, а также вследствие демпфирования, обусловленного податливостью упругих элементов стабилизатора, выполняемых в виде газовой подушки, камер и сильфонов со стенками из пружинистых и эластичных материалов. Дополнительные эффекты гашения обеспечиваются при расширении потока в предкамерах и коллекторах стабилизатора.
Отличительная особенность стабилизаторов давления заключается в том, что они не изменяют проходное сечение трубопровода и имеют минимальное гидравлическое сопротивление: наибольшее распространение получила конструктивная схема стабилизатора в виде участка трубопровода с равномерно распределенной перфорацией, через которую перекачиваемая среда может перетекать из трубопровода в демпфирующую надстройку над перфорированной его частью.
Отличительным конструктивным признаком пневмостабилизатора является разделение с помощью упругой мембраны его внутренней полости на жидкостную и газовую. Один из вариантов конструкции представлен на рис. 1 [1].
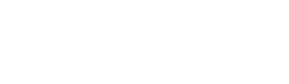
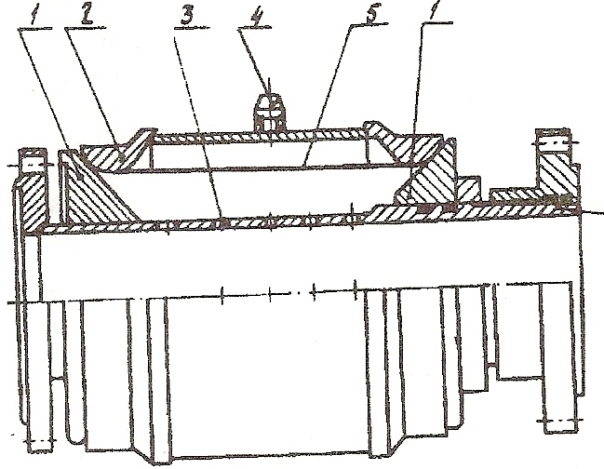 Рис. 1. Пневмостабилизатор давления с гибким разделительным элементом
Рис. 1. Пневмостабилизатор давления с гибким разделительным элементом
Пневмостабилизатор состоит из металлического корпуса 2, в котором размещается участок трубопровода 6 с равномерно распределенной по длине перфорацией 3. Для разделения жидкой и газовой сред в пневмостабилизаторе служит гибкий элемент 5, который может перемещаться между внутренней поверхностью стенки корпуса 2 и наружной поверхностью стенки перфорированной трубы 6. Жидкостная полость пневмостабилизатора соединена посредством перфорации с основной гидромагистралью, а газовая - через штуцер 4 с аккумулятором давления газа.
В зависимости от агрессивности рабочей среды гибкий разделитель 5 может быть как неметаллическим (различные резины, каучуки и пр.), так и металлическим. Уплотнение разделителя 5 производится при обжатии его концов между внутренней полусферой корпуса 2 и конусной поверхностью кольца 1, установленного на трубопроводе 6.
Пневмостабилизатор работает следующим образом. В установившемся режиме движения жидкость, протекающая по трубопроводу 6 через перфорацию 3 заполняет полость, охватываемую разделителем 5. Полость между корпусом 2 и разделителем 5 заполнена газом с тем же давлением, что и в основной магистрали. При появлении пульсаций в трубопроводе 6 давление в жидкостной полости пневмостабилизатора не совпадает с давлением в газовой полости, и разделитель 5 под воздействием этого перепада испытывает упругие деформации, при которых объем жидкостной полости изменяется, т.е. обеспечивается податливость стабилизатора для демпфирования колебаний. Вследствие большой податливости разделителя 5 и газовой полости происходит увеличение скорости перетекания среды из трубопровода в жидкостную полость (или наоборот), что приводит к диссипации энергии колебаний давления на сосредоточенных сопротивлениях перфорационных отверстий. Выбором упругих характеристик разделителя, давления в газовой полости и её объёма, размеров перфорационных отверстий и их суммарной площади можно добиться требуемой степени уменьшения амплитуды колебаний.
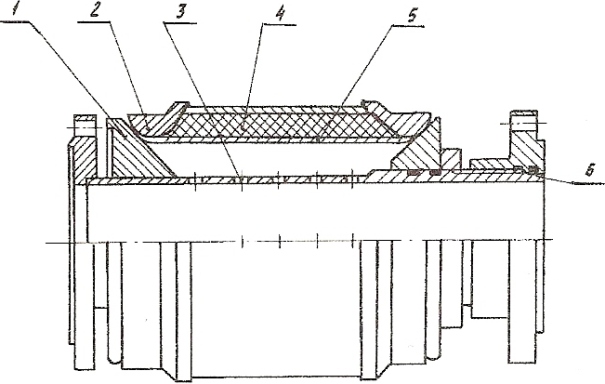 Рис 2. Стабилизатор давления с упругой камерой
Рис 2. Стабилизатор давления с упругой камерой
Рассмотренная выше конструкция легко трансформируется в стабилизатор с упругой камерой (рис. 2). В этом случае, если газовую полость заполнить эластичным материалом 4, обладающим высокой податливостью, то такой стабилизатор также целесообразно использовать в гидромагистралях диаметром не более 0.5 м. и при давлениях не выше 2 МПа, поскольку эффективность его работы при других параметрах будет мала.
Принцип работы рассматриваемого стабилизатора с упругой камерой (рис. 2) тот же самый, что у стабилизатора, показанного на рис. 1. При описании динамических процессов в трубопроводах будем считать, что изменение расхода при закрытии клапана имеет линейный характер.
 Рис. 3 Схема участка трубопроводной системы для расчета гидравлического удара
Рис. 3 Схема участка трубопроводной системы для расчета гидравлического удара
Для анализа волновых процессов в гидросистеме рассмотрим схему, приведенную на рис. 3. Она состоит из следующих элементов: насоса 1, трубопровода 5, обратного клапана 3 и стабилизатора давления 4.
Стабилизатор давления (СД) устанавливается в непосредственной близости от обратного клапана.
Направим координатную ось ОХ вдоль продольной оси расходной магистрали против течения рабочей среды. При анализе динамических процессов будем считать среду однородной.
При рассмотрении динамических процессов будем считать, что давление в ней изменяется по линейному закону. Процесс включения и выключения насосного агрегата сопровождается интенсивными гидравлическими ударами, распространяющимися по всему трубопроводу.
Следует определить начальные условия для системы волновых уравнений, описывающей неустановившееся движение жидкости в трубопроводе. В момент времени t=0
P(0,0)=0, w(0,0)=0.
Начиная с t=0, в сечении х=l (где установлены насос и стабилизатор давления) расход изменяется по закону Q=Q(t).
Начальные условия имеют вид:
t=0; р(х,0)=δp(x,0)/δt=0 | (1) |
Граничные условия в конце трубопровода принимаем:
при х=0 p(0,t)=0 | (2) |
Значение скорости на выходе из стабилизатора давления (x=l) будет определяться выражением:
 | (3) |
где Q0 — начальный массовый расход в момент t=0;
Q(t) — изменение расхода, вызванное изменением режима работы центробежного насоса;
QСТ(t) — изменение расхода через отверстия перфорации стабилизатора;
ρ — плотность жидкости.
Система волновых уравнений решается без учета сил трения методом Даламбера в виде суммы прямой и обратной волн:
 | (4) |
где f1 и f2 функции, определяемые из граничных условий (2) и (3).
Если промежуток времени τиз в течение которого происходит изменение режима работы насоса, незначителен по сравнению с продолжительностью двойного пробега волны давления по трубопроводу τ0=0 будет наблюдаться прямой гидроудар, максимальное давление при котором (при отсутствии стабилизатора) определяется по формуле Жуковского:
(5) |
где Δw — изменение скорости потока вследствие изменения режима работы насоса, а
(6) |
ΔQн — изменение расхода.
Для системы теплоснабжения, длина которой составляет несколько десятков километров, значение τ0 значительно превосходит продолжительность остановки или выхода насоса на режим. Поэтому при выключении насоса в трубопроводе происходят провал давления р=pΔwc , а затем через τ0 такое же по значению повышение давления над рабочим уровнем (гидроудар).
Пуск насоса осуществляется при закрытой задвижке, поэтому волновые процессы в трубопроводе будут определяться динамикой изменения расхода при открытии задвижки.
Дифференциальное уравнение движения жидкости в СД в первом приближении можно записать в виде [2]
 | (7) |
где p – плотность жидкости,
P(t), G(t) — давление и расход жидкости в сечении х магистрали в момент времени t соответственно,
Пд — податливость стабилизатора, характеризующая изменение массы жидкости в полости стабилизатора при изменении давления;
L=l/(gF)=Zτ — параметр, характеризующий инерционность потока жидкости в трубе;
Z=c/(gF) — волновое сопротивление магистрали;
с — скорость распространения волн давления;
F — площадь проходного сечения трубопровода;
τ=1/с — время пробега волной давления длины магистрали;
— частота основного тона колебаний в магистрали без стабилизатора давления;
Gl(t)=G0–Gk(t) — секундный расход в трубопроводе, создаваемый насосом.
Граничные условия для системы (7) запишутся следующим образом:
(8) |
где R1 — коэффициент, характеризующий местные потери давления на начальном участке гидромагистрали;
ΔG(0,t) — вариация расхода жидкости в сечении x=0.
В концевом сечении:
 | (9) |
где l — общая длина трубопровода;
X1 — координата установки СД;
Для линейно изменяющегося закона изменения расхода через обратный клапан в интервале времени 0 ≤t≤t1 где t1 — время закрытия, можно записать:
 | (11) |
Здесь G0 — секундный расход жидкости, создаваемый насосом.
Обозначим:
(12) |
Величина ω0 является частотой основного тона колебаний в трубопроводе со стабилизатором. Уравнение (7) перепишем следующим образом:
 | (13) |
Введем переменную: P(t)=P(t)—LG0/t0 Тогда уравнение (13) примет вид:
 | (14) |
При начальных условиях 
его решение имеет вид:
 | (15) |
откуда:
(16) |
При отсутствии стабилизатора:
(17) |
Если время t1≤2τ то величина гидроудара:![]()
Коэффициент снижения величины гидроудара при установке СД находится как:
(18) |
где ΔР и ΔРcд — величина гидроудара до и после установки СД.
Из выражения (18) можно определить необходимую массовую податливость стабилизатора для обеспечения требуемого уровня снижения провала давления в гидросистеме:
 | (19) |
Задаваясь требуемой степенью снижения амплитуды давления гидроудара из зависимости (19) можно определить величину ωд — частоту основного тона колебаний со стабилизатором.
Таким образом, изменяя такие основные конструктивные характеристики стабилизатора давления, как массовая податливость и гидросопротивление отверстий перфорации, можно достигнуть необходимой степени снижения амплитуды давления гидроудара.
Литература
1. Ганиев Р.Ф., Низамов Х.Н., Дербуков Е.И. «Волновая стабилизация и предупреждение аварий в трубопроводах» - М.: МГТУ им. Н.Э.Баумана, 1996г.
2. «Гидроупругие колебания и методы их устранения в закрытых трубопроводных системах». Под ред. Х.Н.Низамова. - Красноярск: ВНИИГИМ, 1983г.